Coming Soon to a Kármán Line Near You.
Cambridge’s Best and Brightest.
Cambridge University Spaceflight
Cambridge University Spaceflight (CUSF) was founded in 2006 with one vision – to launch a rocket to space, built entirely by students. We’re still a long way off, but with four rockets and countless high altitude balloons under our belt, we get nearer to the Karman line each day.
We’re currently working on our LOX/IPA liquid bipropellant engine, White Giant. At the same time, we’re improving on our avionics and airframe design through iterative launches.
All working towards our final goal – space.

Rockets: Skyward
Martlet | Aquila | Griffin
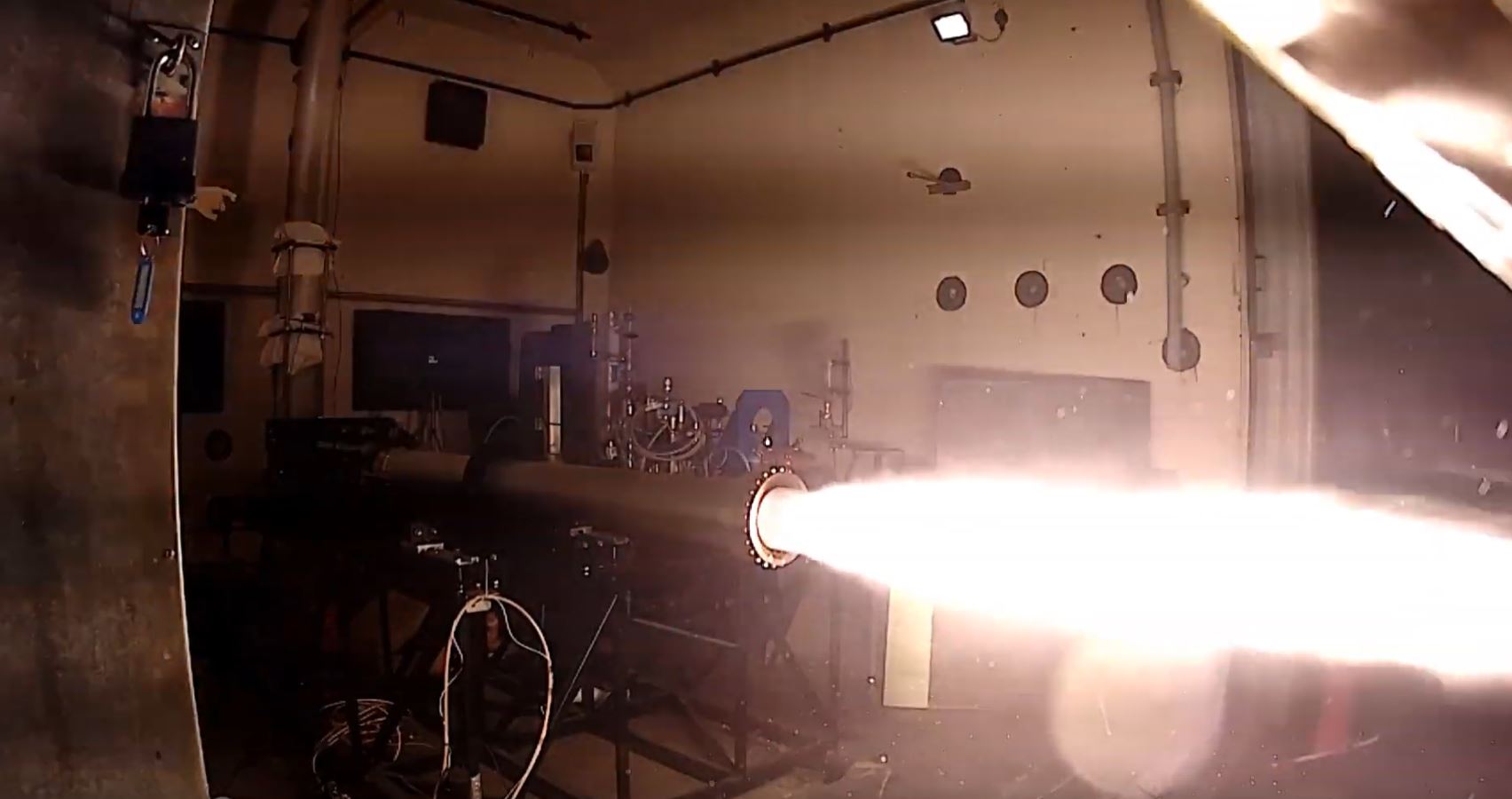
Engines: Hot & Fiery
Pulsar | White Dwarf | White Giant