
Blog
Recent News
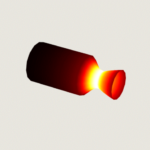
- Manufacture of White Dwarfs Combustion Chamber
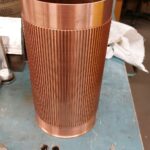 The manufacture of the combustion chamber for White Dwarf has been finished this week. The cooling channels shown were created on a CNC mill in the Whittle Lab, Cambridge University Engineering Department. Below are photos of the original tube, and another of the CNCing taking place. The final part will … Read more
The manufacture of the combustion chamber for White Dwarf has been finished this week. The cooling channels shown were created on a CNC mill in the Whittle Lab, Cambridge University Engineering Department. Below are photos of the original tube, and another of the CNCing taking place. The final part will … Read more - Reaction Engines Visit Cambridge University Engineering DepartmentOn Monday, two lead engineers from Reaction Engines, one of CUSFs sponsors, came to CUED to talk to CUSF members and other students. They discussed the SABRE Demo engine, Applied Technologies and other spin-outs as well as showing us some hardware in-person! We would like to thank Piotr and Felix … Read more
- Initial Renders for White Dwarf and White Giant
 White Dwarf is a project that CUSF are undertaking in order to experiment with liquid engines in preparation for the creation of White Giant, the engine that will take Griffin 1 to the Karman line. This smaller scale engine uses the same architecture for the most important components, allowing us … Read more
White Dwarf is a project that CUSF are undertaking in order to experiment with liquid engines in preparation for the creation of White Giant, the engine that will take Griffin 1 to the Karman line. This smaller scale engine uses the same architecture for the most important components, allowing us … Read more - Griffin 1’s hypersonic recovery system – Daedalus
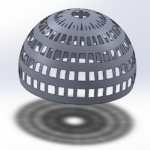 Recovering Aquila from 150km altitude is not a simple problem to solve. Our dedicated recovery division has worked hard this year to design a hypersonic recovery system for Griffin 1, named Daedalus, after the engineer that created Icarus’ wings. Hemisflo Drogue The most complex element of the system is the … Read more
Recovering Aquila from 150km altitude is not a simple problem to solve. Our dedicated recovery division has worked hard this year to design a hypersonic recovery system for Griffin 1, named Daedalus, after the engineer that created Icarus’ wings. Hemisflo Drogue The most complex element of the system is the … Read more - 6DOF flight simulation, CamPyRoS
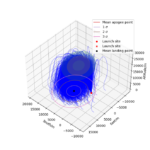 CamPyRoS (Cambridge Python Rocketry Simulator) is CUSF’s fully featured 6 degrees of freedom rocket trajectory simulator. This state of the art software has been worked on extensively by Jago Strong-Wright and Daniel Gibbons. and its features include: 6 degrees of freedom (3 translational, 3 rotational) Monte Carlo stochastic analysis Aerodynamic … Read more
CamPyRoS (Cambridge Python Rocketry Simulator) is CUSF’s fully featured 6 degrees of freedom rocket trajectory simulator. This state of the art software has been worked on extensively by Jago Strong-Wright and Daniel Gibbons. and its features include: 6 degrees of freedom (3 translational, 3 rotational) Monte Carlo stochastic analysis Aerodynamic … Read more - Aquila – Griffin 1’s second stage
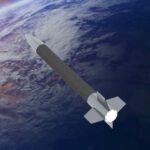 Aquila, named after the genus of true eagles for it’s elegant bistable fin system, is the second stage of Griffin 1; CUSF’s first project which intends to pass the karman line. We are planning to launch Aquila in 2022 for testing. It will be powered by a Cesaroni Pro98, before … Read more
Aquila, named after the genus of true eagles for it’s elegant bistable fin system, is the second stage of Griffin 1; CUSF’s first project which intends to pass the karman line. We are planning to launch Aquila in 2022 for testing. It will be powered by a Cesaroni Pro98, before … Read more - Bamboo – CUSF’s cooling simulation package
 Our cooling team have recently been working on Bamboo, a set of analysis and modelling tools that predicts the temperatures and thermal stresses across combustion chambers. It takes user specified parameters and produces outputs to assist with easy optimisation of designs. Bamboo outputs steady state temperature data, which can be … Read more
Our cooling team have recently been working on Bamboo, a set of analysis and modelling tools that predicts the temperatures and thermal stresses across combustion chambers. It takes user specified parameters and produces outputs to assist with easy optimisation of designs. Bamboo outputs steady state temperature data, which can be … Read more - What have we been up to?
 Even though our hands-on work has been paused in the past 12 months, that doesn’t mean we haven’t been busy here at CUSF. Here’s a quick round up of the projects that we are currently working on. Martlet 4 The 4th member of our Martlet series, this single stage rocket … Read more
Even though our hands-on work has been paused in the past 12 months, that doesn’t mean we haven’t been busy here at CUSF. Here’s a quick round up of the projects that we are currently working on. Martlet 4 The 4th member of our Martlet series, this single stage rocket … Read more
Something Caught Your Eye?
Get in touch! Reach out to contact[at]cusf.co.uk to find out more.