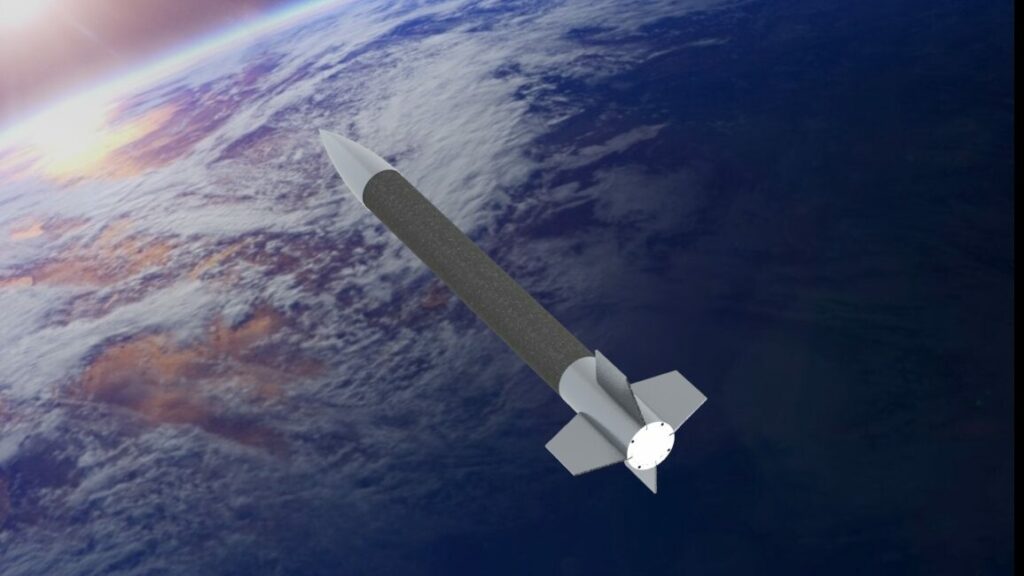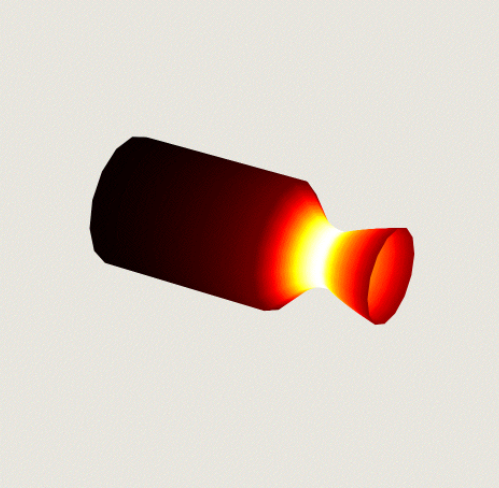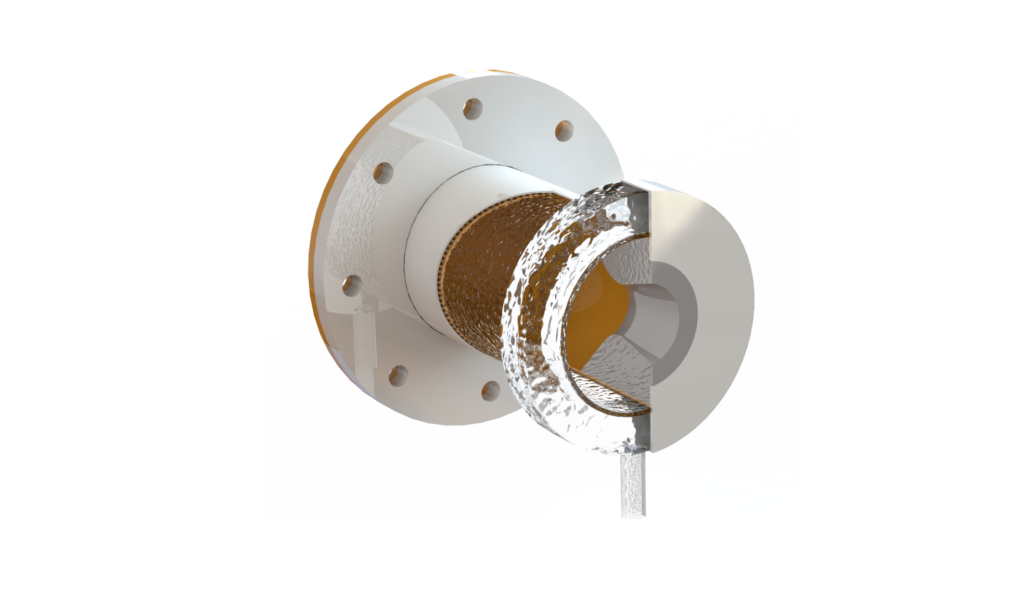
Initial Renders for White Dwarf and White Giant
White Dwarf is a project that CUSF are undertaking in order to experiment with liquid engines in preparation for the creation of White Giant, the engine that will take Griffin 1 to the Karman line. This smaller scale engine uses the same architecture for the most important components, allowing us to test the principles on …